|
|
|
Stabilität eines Regelkreises untersuchen |
|
| Walde90 |
Gast
|
 |
Beiträge: ---
|
|
|
|
Anmeldedatum: ---
|
|
|
|
Wohnort: ---
|
|
|
|
Version: ---
|
|
|
|
 |
|
 Verfasst am: 08.12.2015, 21:45
Titel: Stabilität eines Regelkreises untersuchen
Verfasst am: 08.12.2015, 21:45
Titel: Stabilität eines Regelkreises untersuchen
|
 |
Hallo zusammen,
folgende Aufgabenstellung ist gegeben:
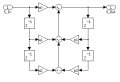
Untersuchen Sie den Regelkreis auf Stabilität indem Sie die Pollagen der Laplace-Übertragungsfunktion prüfen (Hinweis: Nutzen Sie die Matlab Befehle "roots", "Damp" oder pzmap").
Modelparameter des Regelkreises sind folgende:
Ks=0.1
T1=1
T2=0.2
TR1=1
Tsum=0.2
T0=2*Ks*Tsum
Im Anhang findet ihr die Übertragungsfunktion der Regelstrecke.
Wäre nett, wenn mir jemand bei dieser Aufgabe helfen kann.
| Beschreibung: |
|

Download |
| Dateiname: |
Bildschirmfoto 2015-12-08 um 20.40.54.png |
| Dateigröße: |
16.54 KB |
| Heruntergeladen: |
1148 mal |
|
|
|
|
|
|
| Tim |

Forum-Century
|
|
Beiträge: 140
|
|
|
|
Anmeldedatum: 03.11.07
|
|
|
|
Wohnort: Stuttgart
|
|
|
|
Version: 2011b+aktuellstes Release
|
|
|
|
|
|
|
Verfasst am: 08.12.2015, 22:29
Titel:
|
|
Das erste Problem scheint die Aufgabenstellung selbst zu sein. Ks, T1, T2 sind die Parameter der Strecke (PT2 mit 2 reellen Zeitkonstanten). Ergo würde ich annehmen, dass TR1, Tsum und T0 Parameter des Reglers sind. Stellt sich die Frage: Was für ein Regler ist das? Wenn du den Regler hast, dann kannst du die Gesamtübertragungsfunktion herleiten:
 = \frac{F_r(p) \cdot F_s(p)}{1+F_r(p) \cdot F_s(p)}")
Das wäre der erste Schritt.
|
|
|
|
| Walde90 |
Gast
|
|
Beiträge: ---
|
|
|
|
Anmeldedatum: ---
|
|
|
|
Wohnort: ---
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 09.12.2015, 19:27
Titel:
|
|
Hi Tim,
vielen Dank für deine Hilfe. Ich nehme an, das ich die Gesamtübertragungsfunktion nachher beim Programmieren von Matlab brauche oder?
Das mit den Parametern hast du schon recht. Im Anhang ist meine Lösung.
Wie gehe ich nun weiter vor?
| Beschreibung: |
|
Download |
| Dateiname: |
Bildschirmfoto 2015-12-09 um 18.06.13.png |
| Dateigröße: |
37.77 KB |
| Heruntergeladen: |
1160 mal |
|
|
|
|
| Gast |
|
|
Beiträge: ---
|
|
|
|
Anmeldedatum: ---
|
|
|
|
Wohnort: ---
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 18.12.2015, 17:22
Titel:
|
|
Hallo, ich bearbeite gerade die gleiche Aufgabe. Sieht sehr kompliziert aus bei dir.
Gruß Matze
|
|
|
|
| Gast |
|
|
Beiträge: ---
|
|
|
|
Anmeldedatum: ---
|
|
|
|
Wohnort: ---
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 18.12.2015, 17:45
Titel:
|
|
Du brauchst die Übertragungsfunktion des offenen Kreises (Fo). Diese ergibt sich aus dem Produkt der Übertragungsfunktionen des Reglers und der Strecke. Fo= Fr*Fs. Den Regler hast du ja sicher schon aus Aufgabe 3a) mit dem Betragsoptimum ermittelt. Fo hat nen Zähler und nen Nenner, also (Zo) und (No). Deine Führungsübertragungsfunktion Fw=Zo/(Zo+No). Wenn du das ausrechnest, bekommst du für(Zo+No) eine Funktion mit a*s^3+b*s^2+c*s^1+d*s^0. Mit dem Befehl "roots" kannst du jetzt die Polstellen berechnen:
Kann in Matlab dann so aussehen.....
Polstellen=roots([a b c d])
pzmap(Polstellen) % ist die darstellung der polstellen im Diagramm
jetzt mußt du nur noch gucken wo die liegen und kannst sagen ob das system stabil ist oder nicht
|
|
|
|
| Gast |
|
|
Beiträge: ---
|
|
|
|
Anmeldedatum: ---
|
|
|
|
Wohnort: ---
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 18.12.2015, 18:08
Titel:
|
|
Sorry, das mit pzmap(polstellen) funktioniert nicht.
du brauchst die Führungsübertragungsfunktion des geschlossenen Regelkreises Fw. Die bekommst du am einfachsten mit dem "feedback" Befehl.
also:
Fw=feedback(G0,1);
dazu musst du aber im matlab skript die ganzen formeln als modelparameter definieren
gruß Matze
|
|
|
|
| Gast |
|
|
Beiträge: ---
|
|
|
|
Anmeldedatum: ---
|
|
|
|
Wohnort: ---
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 18.12.2015, 18:12
Titel:
|
|
es muß dann heißen:
pzmap(Fw)
|
|
|
|
| Gast |
|
|
Beiträge: ---
|
|
|
|
Anmeldedatum: ---
|
|
|
|
Wohnort: ---
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 18.12.2015, 18:44
Titel:
|
|
|
|
|
| Walde90 |

Forum-Newbie
|
|
Beiträge: 7
|
|
|
|
Anmeldedatum: 10.12.15
|
|
|
|
Wohnort: ---
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 19.12.2015, 13:23
Titel:
|
|
Hallo Gast,
darf ich mal deine Mail Adresse haben? Ich schicke dir dann mal meine Ergebnisse.
Ich habe hier ein andere Funktion als a*s^3+b*s^2+c*s^1+d*s^0".
Mit freundlichen Grüßen
Walde90
|
|
|
|
| Gast |
|
|
Beiträge: ---
|
|
|
|
Anmeldedatum: ---
|
|
|
|
Wohnort: ---
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 20.12.2015, 12:49
Titel:
|
|
|
Hallo Walde, häng sie doch als Anhang dran, deine Funktion.
|
|
|
|
| Walde90 |
Forum-Newbie
|
|
Beiträge: 7
|
|
|
|
Anmeldedatum: 10.12.15
|
|
|
|
Wohnort: ---
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 20.12.2015, 16:28
Titel:
|
|
Hallo,
so, habe es endlich hinbekommen, zumindest das Matlab mir was anzeigt:D...
im Anhang ist meine Funktion. Habe ich übrigens aus meinem Skript entnommen.
Aber wenn du darin ein Fehler siehst, dann kannst du mich auch korrigieren.
Matlab zeigt mir meine Polstellen p1=-2,5+2,5j an.
p2= -2,5-2,5j
Wo sind deine Polstellen?
| Beschreibung: |
|
Download |
| Dateiname: |
Bildschirmfoto 2015-12-20 um 13.40.16.png |
| Dateigröße: |
55.76 KB |
| Heruntergeladen: |
1158 mal |
|
|
|
|
| Walde90 |
Forum-Newbie
|
|
Beiträge: 7
|
|
|
|
Anmeldedatum: 10.12.15
|
|
|
|
Wohnort: ---
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 20.12.2015, 16:36
Titel:
|
|
|
Das würde dann in meinem Fall bedeuten, das ich ein stabiles System habe, da beide Realteile negativ sind.
|
|
|
|
| Gast |
|
|
Beiträge: ---
|
|
|
|
Anmeldedatum: ---
|
|
|
|
Wohnort: ---
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 21.12.2015, 10:32
Titel:
|
|
|
Die polstellen sind die selben wie bei mir. Nur hab ich (1+pT1)aus Regler und Strecke nicht rausgekürzt. Wenn du dann den Nenner ausmultiplizierst kommt die Form raus die ich oben geschrieben hab
|
|
|
|
| Walde90 |
Forum-Newbie
|
|
Beiträge: 7
|
|
|
|
Anmeldedatum: 10.12.15
|
|
|
|
Wohnort: ---
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 21.12.2015, 10:44
Titel:
|
|
Jou okay super;)....dann bedank ich mich für deine Hilfe für diese Aufgabe.
ich habe hier noch eine letzte Aufgabe aber die kann ich dir heute nachmittag mal schicken. Vl. must du die auch zufällig bearbeiten.
|
|
|
|
| Walde90 |
Forum-Newbie
|
|
Beiträge: 7
|
|
|
|
Anmeldedatum: 10.12.15
|
|
|
|
Wohnort: ---
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 21.12.2015, 18:13
Titel:
|
|
Das ist die Aufgabe....
hast du die zufällig auch?
| Beschreibung: |
|
Download |
| Dateiname: |
Bildschirmfoto 2015-12-21 um 17.11.53.png |
| Dateigröße: |
26.56 KB |
| Heruntergeladen: |
1046 mal |
|
|
|
|


|
Gehe zu Seite 1, 2 Weiter
|
|
Einstellungen und Berechtigungen
|
|
Du kannst Beiträge in dieses Forum schreiben.
Du kannst auf Beiträge in diesem Forum antworten.
Du kannst deine Beiträge in diesem Forum nicht bearbeiten.
Du kannst deine Beiträge in diesem Forum nicht löschen.
Du kannst an Umfragen in diesem Forum nicht mitmachen.
Du kannst Dateien in diesem Forum posten
Du kannst Dateien in diesem Forum herunterladen
|
|
Impressum
| Nutzungsbedingungen
| Datenschutz
| FAQ
|  RSS RSS
Hosted by:

Copyright © 2007 - 2026
goMatlab.de | Dies ist keine offizielle Website der Firma The Mathworks
MATLAB, Simulink, Stateflow, Handle Graphics, Real-Time Workshop, SimBiology, SimHydraulics, SimEvents, and xPC TargetBox are registered trademarks and The MathWorks, the L-shaped membrane logo, and Embedded MATLAB are trademarks of The MathWorks, Inc.
|
|



